| Technik |
| |
| |
| In diesem Kapitel werde ich Ihnen den technischen Hintergrund des DAKTYLOSKOPs präsentieren und es in Hardware/Software/Mechanik aufteilen. |
| |
| |
| |
| HARDWARE |
| |
| 1) Display / Monitor |
| |
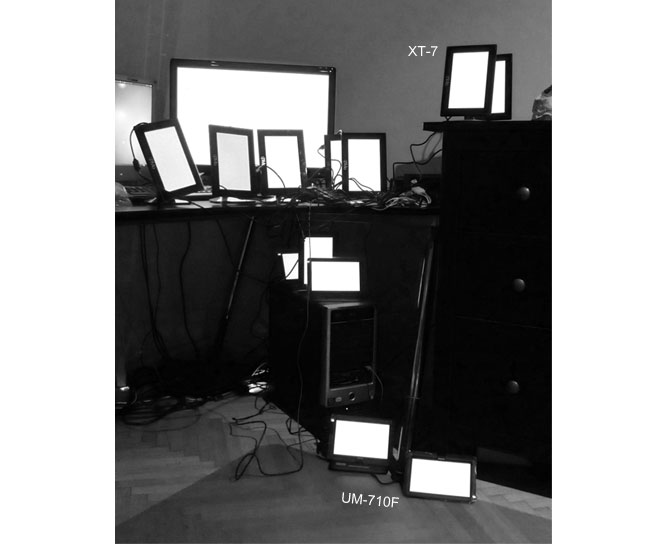
| Wir entschieden uns für MimoMonitore aus der USA, weil sie simple via USB-Kabel die Daten bzw. Strom geliefert bekommen. Sie wurden uns von Philip Drober vorgeschlagen.
Wir verwenden 8 Stück des älteren XT-7 Modells und 4 Stück des neueren UM-710F Modells. |
| |
| http://www.mimomonitors.com/ |
| |
| |
 |
| |
| |
|
2) Netbook + Verbindung + Netzteil |
| |
| Derzeit verwenden wir ein Netbook der Marke ASUS Eee PC 1008HA. ( CPU & Chipset = Intel® Atom N280 / Memory =1GB DDR2 SO-DIMM) |
| |
| http://www.asus.de/Eee/Eee_PC/Eee_PC_1008HA_Seashell/#specifications |
| |
|
Die Displays werden über 2 USB-Hubs mit dem Netbook verbunden. |
| |
|
Die Stromversorgung erfolgt über eine Steckdose, die in der Nähe des Objektes sein sollte. Über einen Schleifring wird der Strom auf die Welle in die Trommel geleitet. Die Kabelverbindung führt vom Schleifring entlang der Welle nach oben in die Trommel zu einem Schaltnetzteil für das Netbook und einem weiteren Netzteil für die Displays/Sensoren/Lüfter. Aus Sicherheitsgründen wird sowohl die Welle als auch die Kurbel über Schleifringe mit dem Schutzleiter verbunden. |
| |
|
Als Netzteil verwenden wir ein RS-75-5, Schaltnetzteil 65/75 W |
| |
|
Die Abwärme der elektrischen Geräte in der Trommel (Netzteile,Displays, Netbook) wird durch einen herkömmlichen PC-Lüfter aus der Trommel in den Unterbau geleitet. Die große Oberfläche des Unterbaus reicht für die Abfuhr der Wärme aus, ohne dass sich problematische Temperaturen ergeben. |
| |
|
3) Sensoren |
| |
|
|
| Die Information zur Abnahme der Geschwindigkeit und der Positionsbestimmung wird zu einem späteren Zeitpunkt veröffentlicht. |
| |
| |
| SOFTWARE |
| |
|
Wir verwenden die OpenSource Plattform Linux im Speziellen das Ubuntu Betriebssystem, um die 12 digitalen Screens anzusprechen. Dafür war ein OpenSource Treiber für die MimoMonitore ausschlaggebend, um sie alle auf einmal – mit nur einem Computer – zum Laufen zu bringen. |
| |
| Es wurde eine C++ Applikation programmiert, um in dieser die zuständigen Daten(Zahlen) zu lesen und zu erkennen. In dieser werden die Treiber der Screens sowie die der Sensoren eingebettet und die Geschwindigkeit und Positionsbestimmung ausgewertet. |
| |
| |
| |
| MECHANIK |
| |
|
Wie haben versucht, die Ästhetik der ursprünglichen optischen Spielzeuge nachzuahmen. Daher verwenden wir für den Antrieb der Trommel keine Elektronik sondern die alt bekannte Zahnradmechanik mit Handkurbel. Grundsätzlichen soll die moderne Technik möglichst nicht in Augenschein treten. |
| |
| |
 |
| |
| |